Robotic Palletizer

Fully automatic high-performance robot palletizer for bags and boxes from the very latest state-of-the-art.
As standard, articulated robots with 4 axes and 4 degrees of freedom and a rotation of up to 360º in the R axis are used. Because of its quick and accurate repetitive movement, this robot type is particularly apt for palletizing and de-palletizing applications. The operation and selection of the pallet pattern is made easy by using a touchscreen.
There are different robot models to choose from depending on the desired performance. As such, in line with the project in question the gripper is also adjusted to the respective application. Depending on the bag type, finger grippers, bag grippers, vacuum grippers or customised grippers are used.
Robot MIG welding machine
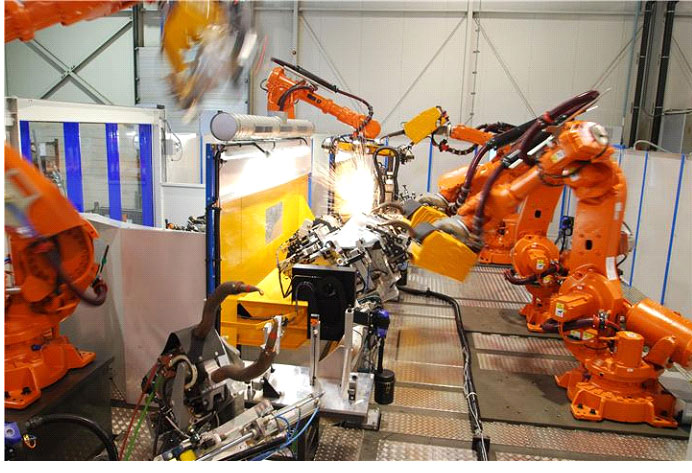
Robotic Metal Inert Gas (MIG) welding, also known as Gas Metal Arc Welding (GMAW), is a commonly used, high deposition rate process that involves feeding a wire continuously toward the heated weld tip. It is considered a semi-automatic welding process.
MIG welding is one of the most popular forms of welding in industrial applications and is an easy process to integrate to a robot system. MIG welding provides a faster process than other forms of welding, especially when robots are incorporated.
MIG welding robots are capable of all-position, adding flexibility to the welding system. Safety from dangerous fumes, higher quality welds and more efficient processes are just some of the advantages that companies see following MIG welding automation.
Race tracking application
Pick-and-place applications comprise both primary handling—putting individual pieces of product into a tray or carton—and case packing. Advances in materials of construction, controlling software and hardware, vision systems and other aspects have made robots, of various types, an increasingly viable option for pick-and-place.
The type of robot most appropriate for a given pick-and-place application depends on the speed required, the size of the payload and other factors.
Pick-and-place Robots

- Delta-style robots that operate from overhead with three or four long, thin arms that meet at the effector head
- SCARA (selective compliant articulated robot arm) models, which are fixed-base robots with three vertical-axis (horizontal-motion) rotary arms; and
- Multi-axis articulated robots, which can have up to six axes, with joints that can rotate in any direction.